Workshop OpenMV
- Ref Source Code ของ OpenMV Board

-
เตรียมความพร้อม install Keil µVision
- ติดตั้ง Keil MDK (Microcontroller Development Kit) คือ ชุดเครื่องมือพัฒนาโปรแกรมสำหรับไมโครคอนโทรลเลอร์ตระกูล ARM https://www.keil.com/download/product/ เลือก MDK-ARM
-
Click MDR-Arm icon ลงทะเบียน ให้เรียบร้อย แล้วจะได้ Link สำหรับการ Download

-
Link Download

-
Double click เพื่อทำการ install

-
ยอมรับ Licence แล้วกด Next

-
เลือก Destination แทนค่า
C:\Users\sysadmin\AppData\Localด้วยC:\Renesasกด Next (เน้นอย่าให้ผิดนะครับ) -
C:\Renesas\Keil_v5และC:\Renesas\Arm\Packs
-
กรอก Customer info

-
install process

-
ติดตั้ง package

-
ติดตั้ง Driver

-
ติดตั้งเรียบร้อย

-
Package installer

ความสำคัญการติดตั้ง โปรแกรม MDK (Microctroller Development Kit)
- คือหลังจากตั้ง MDK จะได้ file UV4.exe ที่ ``C:\Renesas\Keil_v5\UV4\UV4.exe`` ที่เราจะต้องเอาไปใช้ ใน workshop
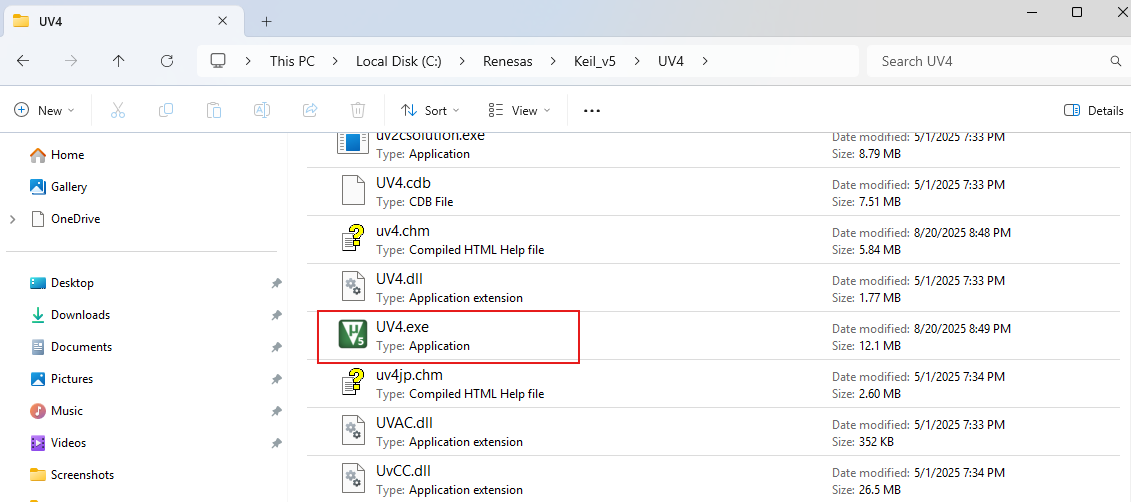
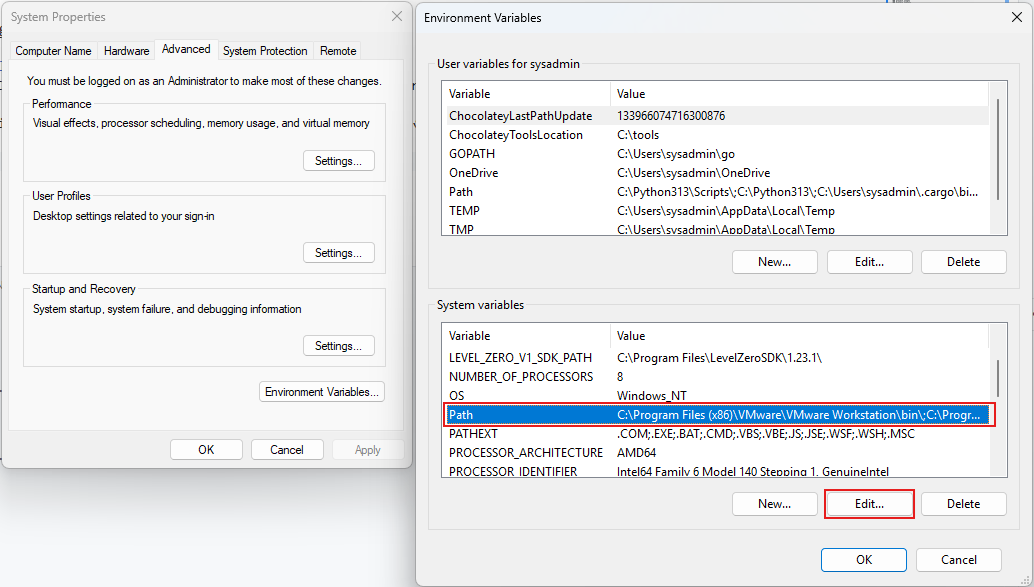
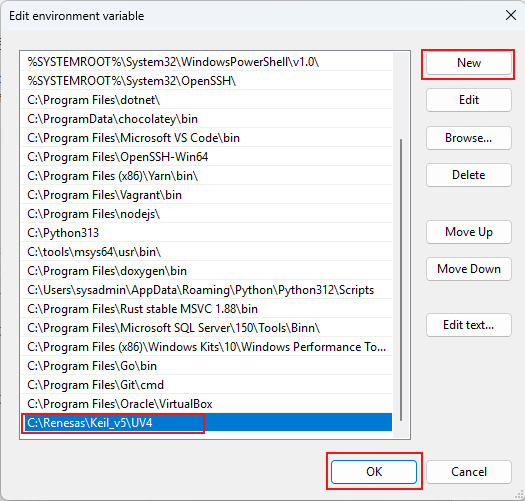
- ให้เพิ่ม ``C:\Renesas\Keil_v5\UV4`` ใน Windows Environment ให้เรียบร้อย ด้วยการ พิมพ์ คำว่า env ใน ช่อง Search windows
- กด ``Environment Variables``
Workshop OpenMV firmware
-
ขั้นตอน 1 Clone project
- Clone ด้วย Git command ไปที่ C:\Reneses
-
File Structure
C:\Renesas\sdk-bsp-ra8d1-vision-board\projects\vision_board_openmv$ tree -L 2 . ├── Kconfig ├── README.md ├── SConscript ├── SConstruct ├── board │ ├── Kconfig │ ├── SConscript │ ├── board.h │ ├── ports │ ├── ra8_it.c │ └── tinyusb ├── buildinfo.gpdsc ├── configuration.xml ├── docs │ └── picture ├── firmware │ ├── omv_example │ └── openmv.hex ├── memory_regions.ld ├── memory_regions.scat ├── mklinks.bat ├── mklinks.sh ├── packages │ ├── CmBacktrace-v1.4.1 │ ├── OpenMV-v4.5.0 │ ├── SConscript │ ├── micropython-v1.13.0 │ ├── rw007-v2.1.0 │ └── tinyusb ├── project.uvoptx ├── project.uvprojx ├── ra │ ├── SConscript │ ├── arm │ ├── board │ ├── fsp │ └── tes ├── ra_cfg │ ├── SConscript │ └── fsp_cfg ├── ra_gen │ ├── SConscript │ ├── bsp_clock_cfg.h │ ├── common_data.c │ ├── common_data.h │ ├── hal_data.c │ ├── hal_data.h │ ├── main.c │ ├── pin_data.c │ ├── vector_data.c │ └── vector_data.h ├── rtconfig.h ├── rtconfig.py ├── script │ ├── ac6 │ ├── fsp.ld │ ├── fsp.scat │ └── memory_regions.ld ├── src │ └── hal_entry.c ├── template.uvoptx └── template.uvprojx (<- (MDK project file)>) 25 directories, 38 files -
Click ไปที่ ปุ่ม
codeและให้ทำการ Copy link สำหรับนำมาใช้เพื่อการ Clone Source ให้เลือกเป็น Protocol https นะครับ
-
เปิด Terminal ของ windows เพื่อทำการ Clone Repository
 หากท่านใดในเครื่องไม่มีคำสั่ง git ให้ทำการติดตั้ง ให้เรียบร้อยก่อน โดยสำหรับ windows ก็ให้ Download ได้ที่ https://git-scm.com/downloads
หากท่านใดในเครื่องไม่มีคำสั่ง git ให้ทำการติดตั้ง ให้เรียบร้อยก่อน โดยสำหรับ windows ก็ให้ Download ได้ที่ https://git-scm.com/downloads

-
เมื่อ Download เรียบร้อย ต่อไปก็จะ ดำเนินการ import เข้าสู่ RT-Thread IDE ซื่งสามารถทได้ โดยไปยัง เมนู File > import และ ชี่ไปยัง Folder
C:\Renesas\sdk-bsp-ra8d1-vision-board

-
เลือก RT-Thread Studio Project

-
เลือก Location
C:\Renesas\sdk-bsp-ra8d1-vision-board\projects\vision_board_openmv
-
ให้เปิด File Explore แล้วไปยัง project Folder ที่เลือกไว้นะครับ ให้ดูภายใน Folder จะพบว่ามีไฟล์ ชื่อ
mklinks.batให้เรา Double Click ไฟล์นี้เพื่อให้ ไปสร้าง Folder ชื่อ libraries และ rt-thread
Screen

-
ต่อมาให้เราเปลี่ยน Tool Chain เป็น version 13.2.1

-
หากมี Error แสดงว่า การเลือก toolchain ผิดพลาด ให้กลับไปเลือกใหม่

-
Build All และ Flash Download ไปยัง อุปกรณ์
 ไม่มี Error แต่ยังพบ Warning
ไม่มี Error แต่ยังพบ Warning -
Flash upload

-
Terminal

เชื่อมต่อ Board ที่ได้ โปรแกรมเรียบร้อย กับ Programe OpenMV
-
มีลำดับและขั้นดังต่อไปนี้:
- การเชื่อมต่อ ให้สลับช่องเสียบ บนบอร์ด Vision ไปเป็น USB-OTG
- เมื่อสลับเรียบร้อย ให้เปิด โปรแกรม OpenMV IDE
- กดปุ่ม Connect เพื่อทำการเชื่อมต่อ โปรแกรม OpenMV IDE กับ Board

หากมีความต้องการให้ update firemware เลือก เป็น No ไปก่อน

กดปุ่ม Start เพื่อ ทำการ Run ภาษา Micropython ที่อยู่ใน code editor

กดปุ่ม Terminal เพื่อเปิด Serial Terminal
 ขอแนะนำให้ หารูป ที่มีสีสันชัดเจน เพื่อให้ Sensors สามารถจัด ค่า Spectrum ของสีได้ชัดเจน
ขอแนะนำให้ หารูป ที่มีสีสันชัดเจน เพื่อให้ Sensors สามารถจัด ค่า Spectrum ของสีได้ชัดเจนScreen:

Workshop Lab Color Space
-
เปลี่ยน โหมด การอ่านภาพ Histograme ให้เป็น
Lab Color Space
-
ต่อไป ให้เลือก Tools > Machine Vision > Threshold Editor และ เลือก
Frame Buffer as image source
เลือก เป็น Framebuffer

ปรับค่า L,a,b จนกระทั้งสามารถตรวจวัตถุได้

Screen:

- Copy ค่า Lab Threshold เอาไว้ใช้ใน Workshop ต่อไป

(18, 78, -69, 39, 29, 32)
Workshop ปรับแต่ Micropython code
- ให้เราทำ Workshop ต่อนะครับ ตอนนี้ ก็มาแก้ไข Code ของ Python โดยให้นำค่าที่ Copy เอาไว้ ไปใส่ในค่าตัวแปร ที่ชื่อว่า
clr_thresholdโดยเป็นการระบุตัวแปรชนิด tuple
Note
LAB Color Space Threshold -> (min_L, max_L, min_A, max_A, min_B, max_B)
รายละเอียดค่าใน tuple:
18, 78 → ช่วงค่าความสว่าง (L channel)
-69, 39 → ช่วงค่า green-red (A channel)
-29, 32 → ช่วงค่า blue-yellow (B channel)
- สร้าง File > new ชื่อไฟล์
object-detection.py

**Backup ไฟล์เก่าเก็บไว้สำหรับเอาไว้อ่านค่า Threshold